Problem
Large-scale industrial facilities require frequent maintenance in order to operate, but shutting down the facility introduces a massive cost.
Alternatively, a 3D virtual model of the facility can be used to monitor its state, however
the cost of manual modeling outweighs its benefits. 80% of the modeling time is spent on labor for converting raw scanned data to 3D models.
How can we efficiently reduce the modeling time by automating the process?
Facilities built before the advent of CAD in 1976 don't even have a CAD model. Major refineries are not currently built and the need to retrofit the existing ones becomes more and more substantial. There are 346,000 industrial facilities in the U.S. and 3,460 facilities in the UK with a short design life of 15-30 years. 93% of the existing facilities need to be refurbished by 2050 in the U.K.
Automating the 3D modeling procedure can assist to achieve this goal. The benefits are not only in the reduction of modeling cost, where labor hours will dramatically decrease, but facility managers will also be more proactive to make decisions critical for the lifecycle of the factory and its maintenance will be better monitored. Addition of sensors in the geometric Digital Twin will enable efficient live access to the factory for all its life.

Data
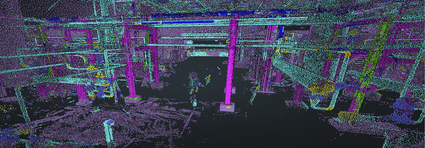
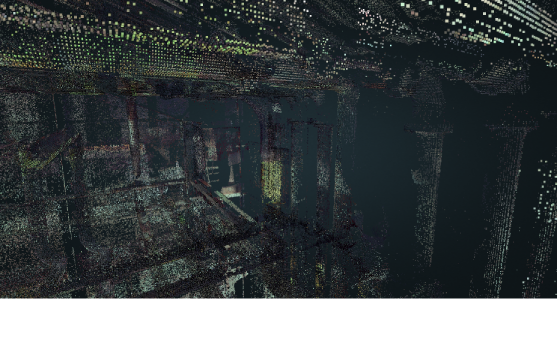
We collected scans of real-world facilities to be able to run deep learning algorithms.
Currently, the construction sector is one of the industries will the least amount of data available to be able to capture existing conditions. As such, the deployment of the state-of-the-art tools especially in the deep learning domain is not possible.
There are a few datasets capturing building spaces, however no dataset is publicly available for laser scanned industrial facilities. We are the first to provide the largest available dataset to date in this domain. We include the laser scans of each facility in the format of point clouds, semantic annotations per point (same group of objects, e.g. cylinders) and instance segmentation annotations per point (separately, object by object, e.g. points of one cylinder). We also provide the 3D model of some facilities (where available).
Our dataset has 4.3 billion annotated points capturing 4,060 m2 and five real-world, existing factories. Our annotations are based on the most important industrial shapes found in industrial scenes. These were found after a statistical analysis conducted on as-designed BIM models of factories. These shapes constitute 75% of a facility on average, meaning that if we automate the process for modeling those, then we can model the rest of the objects manually.
Segmentation
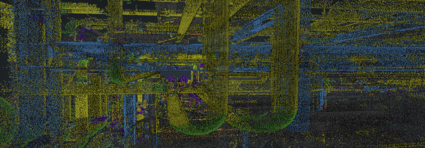
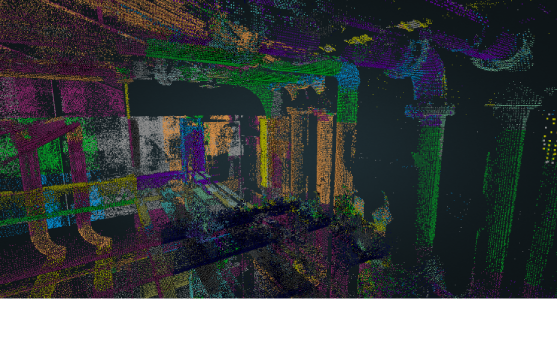
We use state-of-the-art deep learning tools to segment the facility into the 8 most important object classes as well as into individual object instances.
Industrial spaces are open spaces, meaning that their objects can span across the whole facility especially for the case of pipelines. As such, we intelligently parse the 3D space in meaningful subspaces (windows) and the windows into smaller subspaces (blocks).
We then use deep learning to predict the class and instance label for each data point. We achieve 80% precision and recall on average on our test data.
Modeling
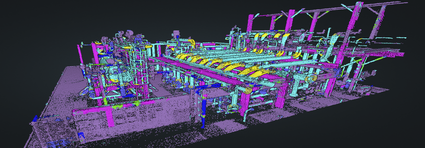
Our tool uses class predictions to produce an actual model of the facility and allows users to easily detect mistakes and correct them.
Much more extensive automated modeling than existing state-of-the-art software which only focuses on one object class.
This results in substantial savings in modeling time.
We generate 3D CAD models of the detected piping shapes according to ASME standards and structural steel shapes according to ASTM standards. These can be customized according to the manufacturer's specifications. Our tool is interactive and gives the users the flexibility to adjust the 3D models according to their discretion.
A key aspect of our CLOI visualization tool is that the users can choose to process their data at 3 different abstraction levels: (a) point clouds of segmented CLOI shapes (cylinders, valves, elbows, flanges, I-beams, channels, angles) and segmented points per individual shape, (b) meshes per individual shape and (c) 3D models per individual shape.
Another key feature is that we give the users a level of confidence of our predicted shapes to give their manual modeling efforts towards the shapes with low confidence level of predictions.
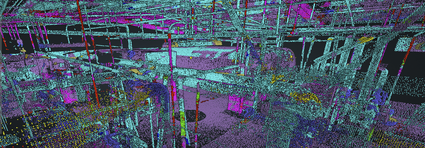
Oriented Bounding Boxes
Segmented instances are used to define the bounding boxes of each shape.
Orientation and rotation parameters are determined.
Learn More
Shape fitting
Standardized shapes are fitted to the oriented bounding boxes.
These shapes are customized according to piping and structural specifications.
Learn More